remoteAPI in C++ <<
Previous Next >> 0512
0511
嘗試以C++最為remoteAPI控制的語言
compiler為code block in Win10
不論怎麼修改在
後還是出現問題
simxGetObjectHandle(clientID, "joint1", &joint01, simx_opmode_oneshot_wait);
上程式片段中
simx_opmode_oneshot_wait
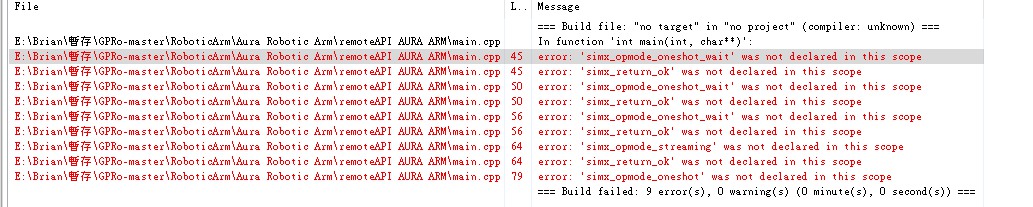
此定義一直出現error,內容如下
error: 'simx_opmode_oneshot_wait' was not declared in this scope
中譯: simx_opmode_oneshot_wait 定義不明
但是在尋找網路上的範例,寫法也都是如我程式中一樣,目前還在尋找解決方法
附上程式
#include <Windows.h>
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
extern "C" {
#include "remoteAPI/extApi.h"
}
using namespace std;
int main(){
int clientID = 0;
simxFinish(-1);
clientID = simxStart((simxChar*)"127.0.0.1", 19997, true, true, 5000, 5);
Sleep(1);
if (clientID != -1)
{
int joint01;
int joint02;
int joint03;
int joint04;
int joint05;
simxGetObjectHandle(clientID, "joint1", &joint01, simx_opmode_oneshot_wait);//setting
simxGetObjectHandle(clientID, "joint2", &joint02, simx_opmode_oneshot_wait);
simxGetObjectHandle(clientID, "joint3", &joint03, simx_opmode_oneshot_wait);
simxGetObjectHandle(clientID, "joint4", &joint04, simx_opmode_oneshot_wait);
simxGetObjectHandle(clientID, "joint5", &joint05, simx_opmode_oneshot_wait);
float degset01=-11.9;
float degset02=34.69;
float degset03=-20.2;
float degset04=-11.9;
float degset05=-11.9;
float dif=1;
//angle set0
simxSetJointTargetPosition(clientID,joint01,degset01,simx_opmode_oneshot);
simxSetJointTargetPosition(clientID,joint02,degset02,simx_opmode_oneshot);
simxSetJointTargetPosition(clientID,joint03,degset03,simx_opmode_oneshot);
simxSetJointTargetPosition(clientID,joint04,degset04,simx_opmode_oneshot);
simxSetJointTargetPosition(clientID,joint05,degset05,simx_opmode_oneshot);
bool balance_contral=true;
clientID,auxiliaryData=simGetSimulatorMessage();
while (clientID!=-1) {
if (clientID==simxmessage_keypress) {
if (auxiliaryData[1]==2009) { //up Key
degset01=degset01+dif;
simxSetJointTargetPosition(clientID,joint01,degset01,simx_opmode_oneshot);
}
if (auxiliaryData[1]==2010) { //down key
degset01=degset01-dif;
simxSetJointTargetPosition(clientID,joint01,degset01,simx_opmode_oneshot);
}
if (auxiliaryData[1]==2007) { //left key
degset02=degset02+dif;
simxSetJointTargetPosition(clientID,joint02,degset02,simx_opmode_oneshot);
}
if (auxiliaryData[1]==2008) { //right key
degset02=degset02-dif;
simxSetJointTargetPosition(clientID,joint02,degset02,simx_opmode_oneshot);
}
if (auxiliaryData[1]==56) { //num8 key
degset03=degset03+dif;
simxSetJointTargetPosition(clientID,joint03,degset03,simx_opmode_oneshot);
}
if (auxiliaryData[1]==50) { //num2 key
degset03=degset03-dif;
simxSetJointTargetPosition(clientID,joint03,degset03,simx_opmode_oneshot);
}
if (auxiliaryData[1]==54) { //num6 key
degset04=degset04+dif;
simxSetJointTargetPosition(clientID,joint04,degset04,simx_opmode_oneshot);
}
if (auxiliaryData[1]==52) { //num4 key
degset04=degset04-dif;
simxSetJointTargetPosition(clientID,joint04,degset04,simx_opmode_oneshot);
}
if (auxiliaryData[1]==49) { //mun1 key
degset05=degset05+dif;
simxSetJointTargetPosition(clientID,joint05,degset05,simx_opmode_oneshot);
}
if (auxiliaryData[1]==51) { //num3 key
degset05=degset05-dif;
simxSetJointTargetPosition(clientID,joint05,degset05,simx_opmode_oneshot);
}
if (auxiliaryData[1]==48){ //setting auto Balance at num0 key
if (balance_contral==true){
balance_contral=false;
}else{
balance_contral=true;
}
}
if (balance_contral==true) {
if (auxiliaryData[1]==2007) {
degset03=degset03+dif ;
simxSetJointTargetPosition(clientID,joint03,degset03,simx_opmode_oneshot);
}
if (auxiliaryData[1]==2008) {
degset03=degset03-dif;
simxSetJointTargetPosition(clientID,joint03,degset03,simx_opmode_oneshot);
}
}
}
clientID,auxiliaryData=simGetSimulatorMessage();
}
}
simxFinish(clientID);
return clientID;
}
remoteAPI in C++ <<
Previous Next >> 0512